有关视觉SLAM的综述文章,有助于整体掌握视觉SLAM的基础知识和概念。
”SLAM 视觉SLAM 综述“ 的搜索结果
SLAM综述文章
标签: 计算机视觉 SLAM
然而,现有的系统与方法鲁棒性并不高,随着人工智能技术的发展,深度学习与传统的基于几何模型的方法相结合的趋势正在形成,这将推动视觉SLAM技术朝着长时间大范围实时语义应用的方向前进。 视觉SLAM算法的现状 1、...
深度学习在视觉SLAM研究中的应用综述,敬学良,王晨升,目前采用视觉传感器的地图同步定位与地图构建(SLAM)逐渐成为SLAM研究中的重点方向,首先介绍了视觉SLAM的基本结构,并分析了传统中

基于深度学习的视觉SLAM 综述 赵洋,刘国良,田国会,罗勇,王梓任,张威,李军伟 (山东大学控制科学与工程学院,山东济南250061) 摘要:综述了深度学习技术应用到同步定位与地图创建(SLAM)领域的最新研究进展,...
视觉SLAM方案整理及硬件选型调研/视觉里程计算法综述

深度学习在视觉SLAM中应用综述.pdf
第三节讲述视觉SLAM:相机传感器,开源系统,视觉惯性里程计,深度学习的应用。 第四节讲述激光雷达与视觉的融合。 最后展望SLAM的发展前景。 第一节:概述 **SLAM:**同时定位和建图(Simultaneous Localization ...

视觉SLAM综述(入门篇)
标签: 计算机视觉
最近几天刚刚接触到视觉slam这个研究方向,发现这个方向的知识点挺多挺杂的,于是就自己看文献,刷博客,大致对视觉slam有了整体的了解. 这篇博客也算是一个简单的小综述,具体的知识点正在学习之中。 目录 SLAM...


基于深度学习的视觉slam综述,是利用深度学习学习slam

计算机视觉与深度学习SLAM综述(自主移动机器人同时定位与地图创建) 计算机视觉.pdf
作为vins(视觉惯性导航系统,visual-inertial system)的基础–纯视觉算法,分为两种:一种是基于批量的运动恢复结构(SfM, Structure-from-Motion)方法,一种是基于滤波(filter)的方法。 然而,...

SLAM综述论文整理分享
标签: slam 综述
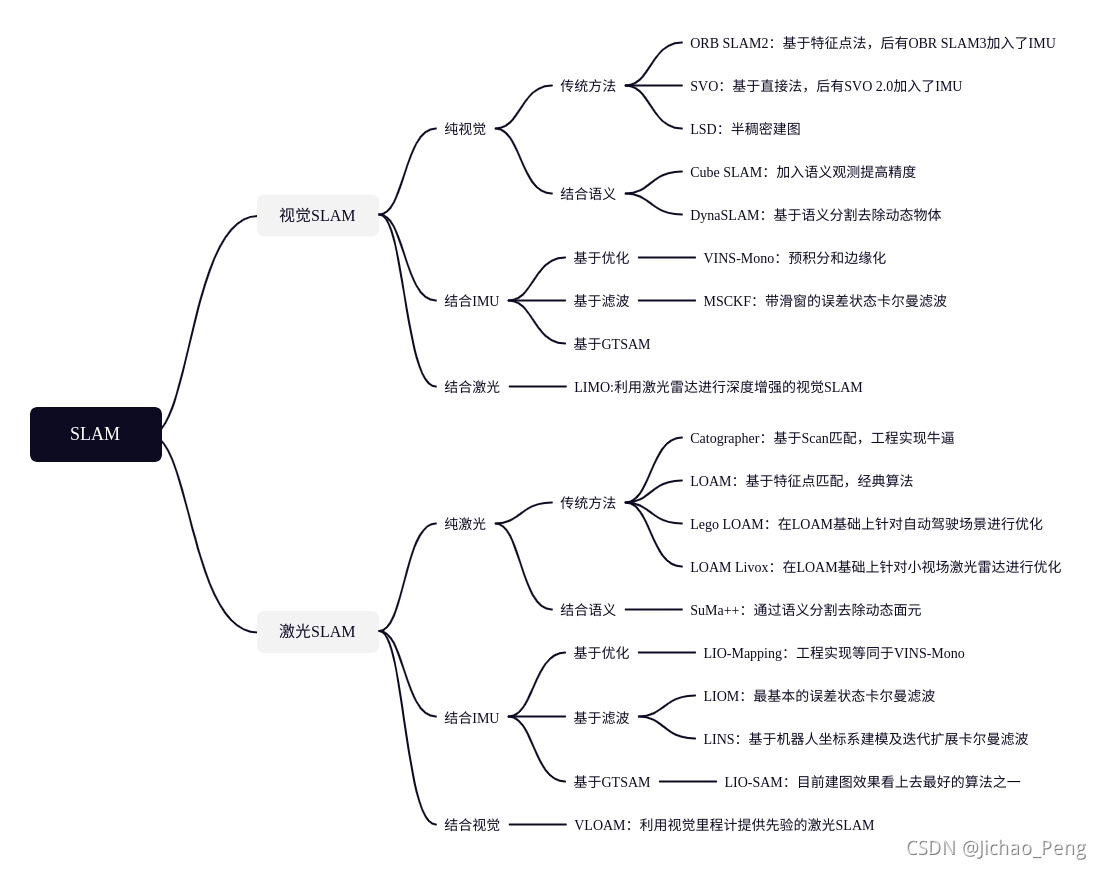
里面包含了对于激光SLAM、视觉SLAM、多传感器融合SLAM的发展,各种方法的优缺点的整理,引用整理了多篇论文,有需要的可以自行查看


同时定位与地图构建(SLAM)是机器人搭载视觉、激光、里程计等传感器,对未知环境构建地 图的同时实现自定位的过程,在机器人自主导航任 务中起着关键作用 [1-4].当前 SLAM 问题的研究手 段主要是通过在机器人本体...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达SLAM包含了两个主要的任务:定位与构图,在移动机器人或者自动驾驶中,这是一个十分重要的问题:机器人要精确的移动,就必须要有一个环境...
基于深度学习的视觉SLAM

推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地